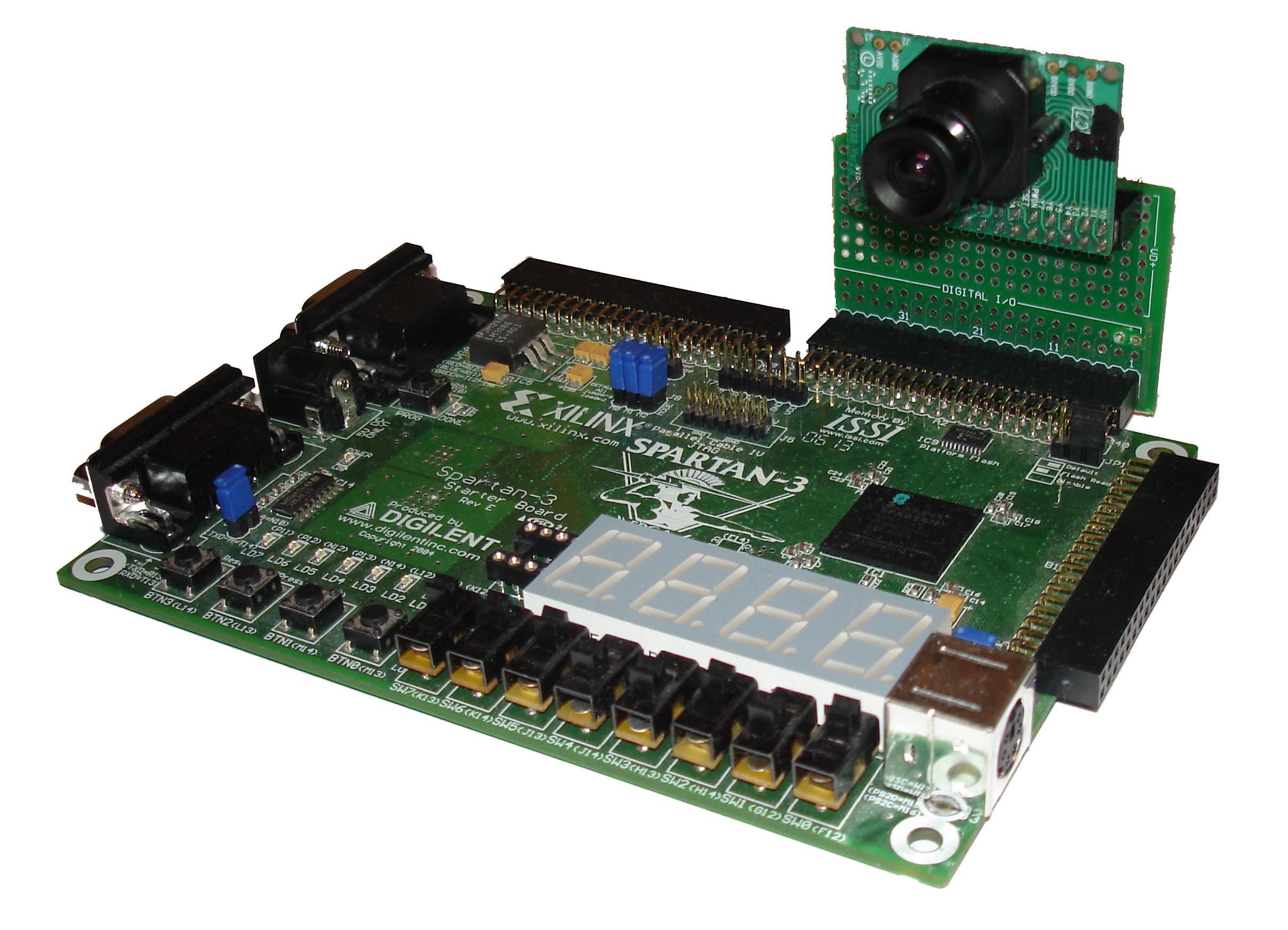
This is the award-winning FALCON I object recognition system! Capable of tracking up to 12 different objects simultaneously, and with over 6 times the raw resolution of the CMUCam, this is one of the most powerful vision systems in its class. Sample code for the 2006-2007 IFI robot controllers is available in the downloads section.
Information on hardware required to run this open source project is included on the Wiki pages, along with a complete listing of technical data.
|